可控液滴输运在微流控、水收集、生物检测和冷凝换热等领域应用广泛。为了实现更加精确灵活的液滴操控,研究人员引入了磁场、电场和光场等多种外场刺激。尽管上述研究通过表面磁致形变、静电效应和光电效应等方式实现了高效的液滴操控,但在表面和/或液滴未进行预处理的条件下,实现多功能非接触式液滴操控仍是一个挑战。

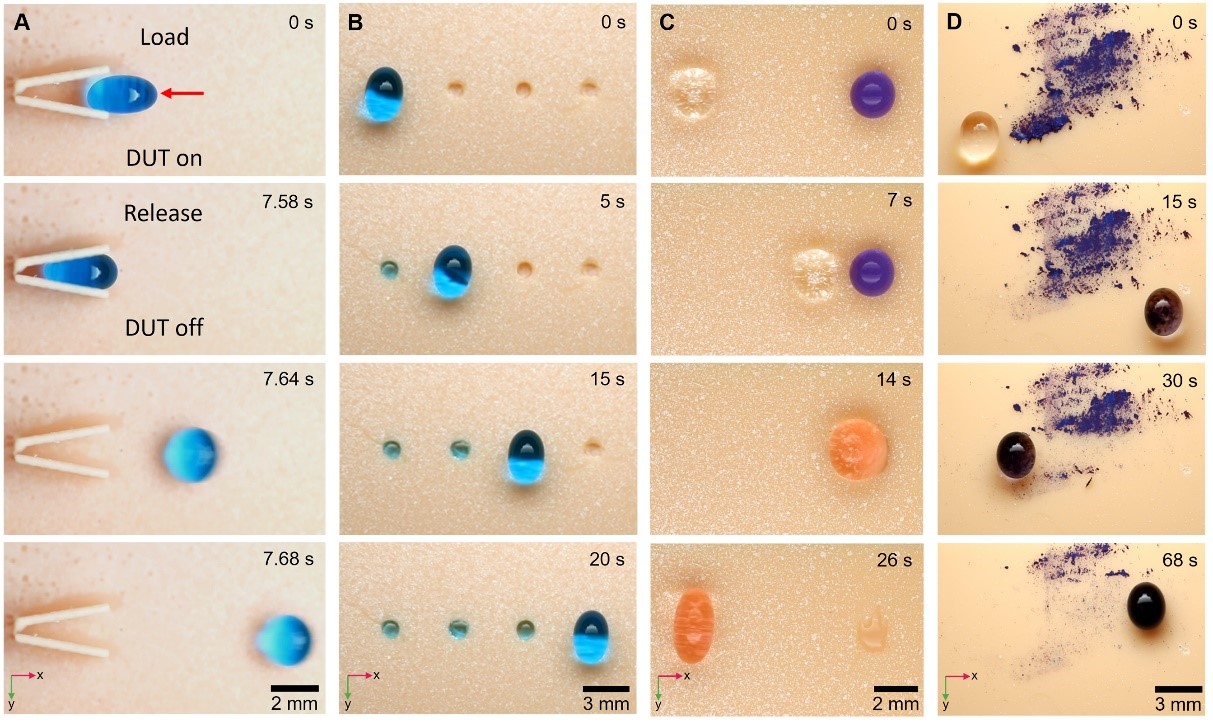
近日,我校金沙js1005线路刘亚华教授团队设计了一种液滴超声波镊子(droplet ultrasonic tweezer,DUT),实现了非接触式多功能液滴捕获与高效操控。基于超声相控阵技术在表面构建能够捕获液滴的双阱声场,通过改变双阱声场的位置实现了液滴可编程精准操控。其出色的操控能力使液滴能够穿过狭窄缝隙、翻越陡坡、逆重力往复运动和定向弹射等。相关成果以“Ultrasonic tweezer for multifunctional droplet manipulation”为题发表在国际期刊Science Advances上,并被选为当期封面。
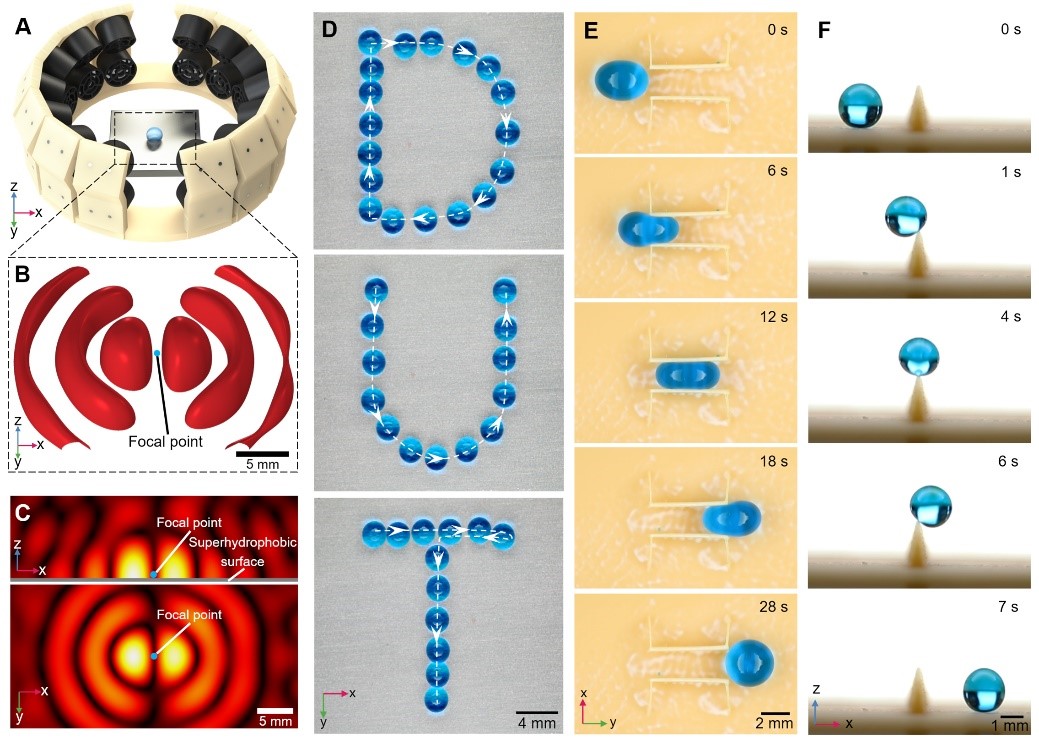
研究人员阐明了液滴能够被DUT稳定捕获和操控的机理:液滴在运动过程中受不平衡的声辐射力作用使其朝向双阱声场焦点移动并最终稳定在焦点位置。基于此,研究团队实现了表面液滴定向弹射、液滴均匀分配、液滴微反应以及表面清洁等基础应用。该研究创新性地将声悬浮技术引入表面流体输运,无需对表面和/或液滴进行预处理即可实现高效精准液滴操控,为可控液滴高效输运和软体机器人等领域的发展提供了新思路。
文章第一作者为金沙js1005线路博士生原子超,通讯作者为刘亚华教授。其他作者包括金沙js1005线路卢晨光、刘聪、白翔鸽、冯诗乐教授和赵磊副教授。该研究成果得到了国家重点研发计划项目和国家自然科学基金项目等的资助。

